4 Minutes
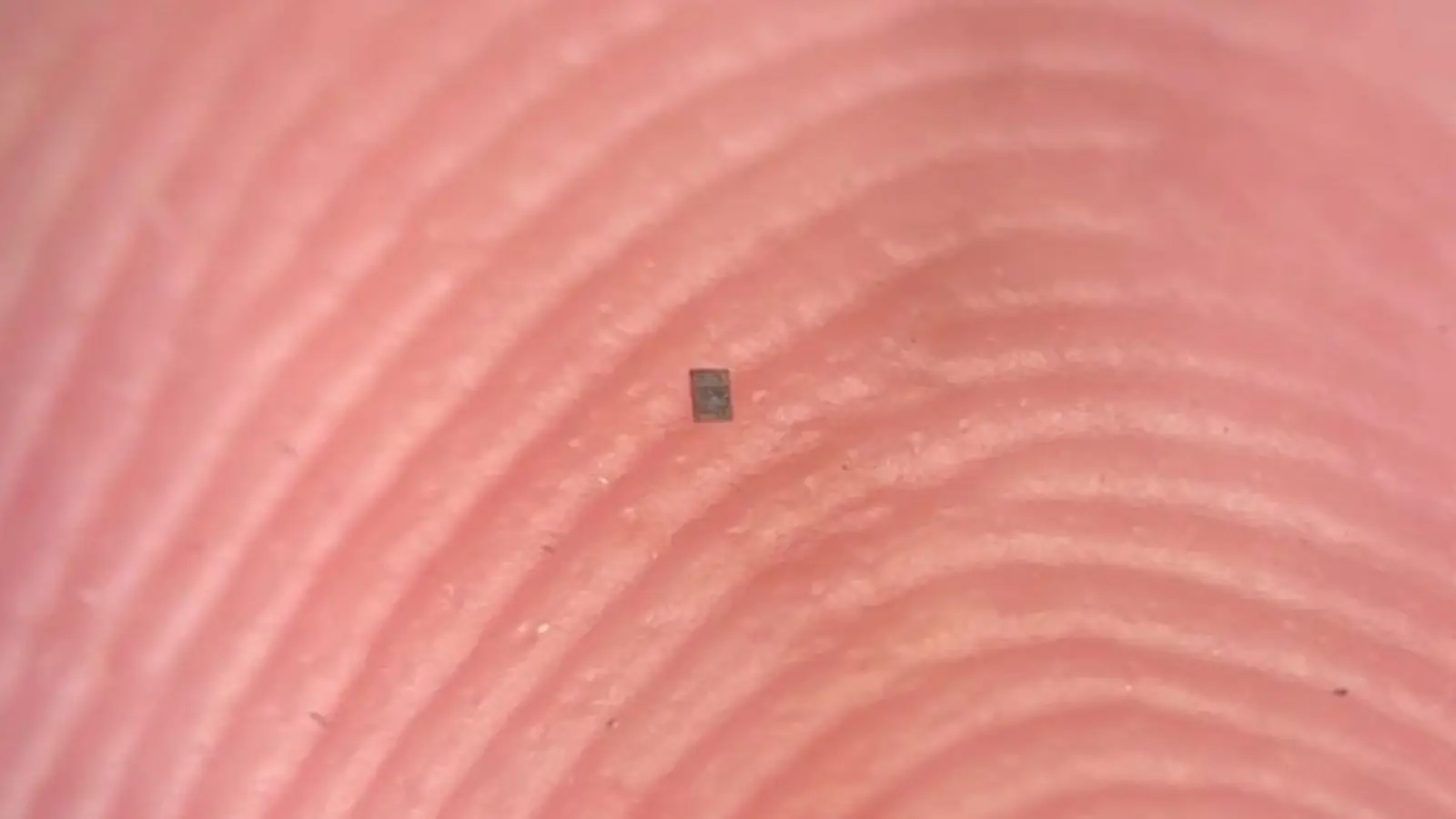
Pensilvanijos universiteto ir Mičigano universiteto inžinieriai sukūrė beveik nematomą, visiškai programuojamą mikrorobotą, kuris, panardintas į skystį, gali pats jutinti, skaičiuoti ir judėti. Ne didesnis už druskos grūdelį, šis įrenginys — pakankamai mažas, kad subalansuotųsi ant piršto atspaudo briaunos — žymi reikšmingą ankstesnių autonominių robotų platformų sumažinimą ir atveria naujas mikro robotikos galimybes.
Kaip mažas yra „mažas“ ir kodėl tai svarbu
Naujasis mikrorobotas yra maždaug 200 × 300 mikrometrų ploto ir vos 50 mikrometrų storio. Kad būtų aiškiau: jis mažesnis už strazdaną ir gali sėdėti ant monetos nepaslėpdamas ant jos įspausto leidimo datos. Mirktelėkite ir galite jo nepastebėti.
Dydis mikrometrų skalėje turi esminę reikšmę, nes keičiasi judėjimą lemiančios fizikos taisyklės. Žemės trauka ir inercija — kurios dominuoja žmogaus masteliu — tampa nereikšmingos. Vietoj jų svarbiausios tampa klampiosios jėgos ir pasipriešinimas. Kaip paaiškina nanorobotikos inžinierius Marc Miskin iš Pensilvanijos universiteto: kai esi pakankamai mažas, „stumti vandenį panašu į stūmimą per pasterą“. Šių skysčio mechanikos iššūkių įveikimas reikalavo naujo požiūrio į varomąsias sistemas, valdymą ir skaičiavimus.
Ką sutalpinama druskos grūdelio dydžio robote
Nepaisant itin mažo tūrio, platforma jungia procesorių, atmintį, jutiklius, imtuvus ir energijos šaltinį. Tyrėjai kiekvieną mikrorobotą aprūpino smulkiomis saulės baterijomis, kurios iš LED apšvietimo surenka maždaug 100 nanovatų galios — pakankamai, kad veiktų bazinis jutimas, sprendimų priėmimas ir judėjimas. Robotas gali matuoti aplinkinio skysčio temperatūrą ir perduoti šiuos matavimus per užprogramuotus judesius — elgesį, kurį palygina su bičių judesių patternais.
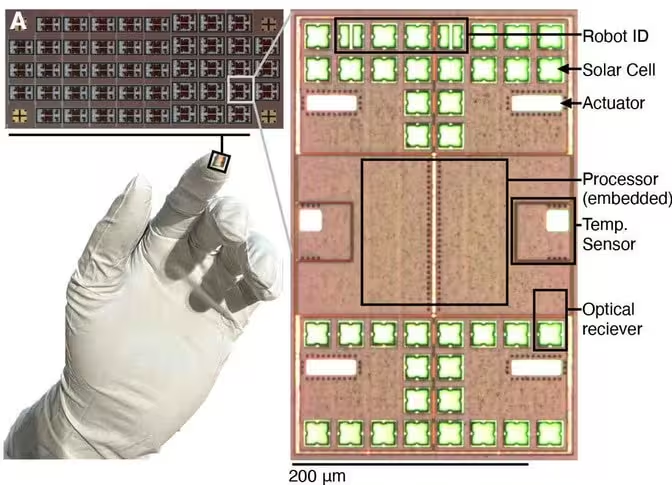
Mikrorobotai, pagaminti ant plėvelės (viršuje kairėje), kurios apimtis maždaug atitinka piršto galiuko plotą (apačioje kairėje). Kiekvienas robotas turi saulės elementus, optinius imtuvus, du temperatūros jutiklius, procesorių informacijai apdoroti ir sprendimams priimti, keturias aktyvatorių plokšteles, kurios generuoja judesį, ir keturis imtuvus, leidžiančius robotui atpažinti atkeliaujančias programas.
Varomoji jėga be judančių galūnių
Tradicinė lokomocija — smulkios galūnės ar irklai — šiame mastelyje tampa trapios ir nepraktiškos. Vietoje to Pensilvanijos komanda sukūrė varomosios sistemos principą be atvirų judančių detalių. Mikrorobotas generuoja elektrinį lauką aplink savo kūną, kuris skatina molekulinius srautus aplinkiniame skystyje. Įrenginys efektyviai keičia vietinį srauto lauką: tarsi robotas ir plauktų upėje, ir tuo pačiu stumtų pačią upę, kad judėtų.
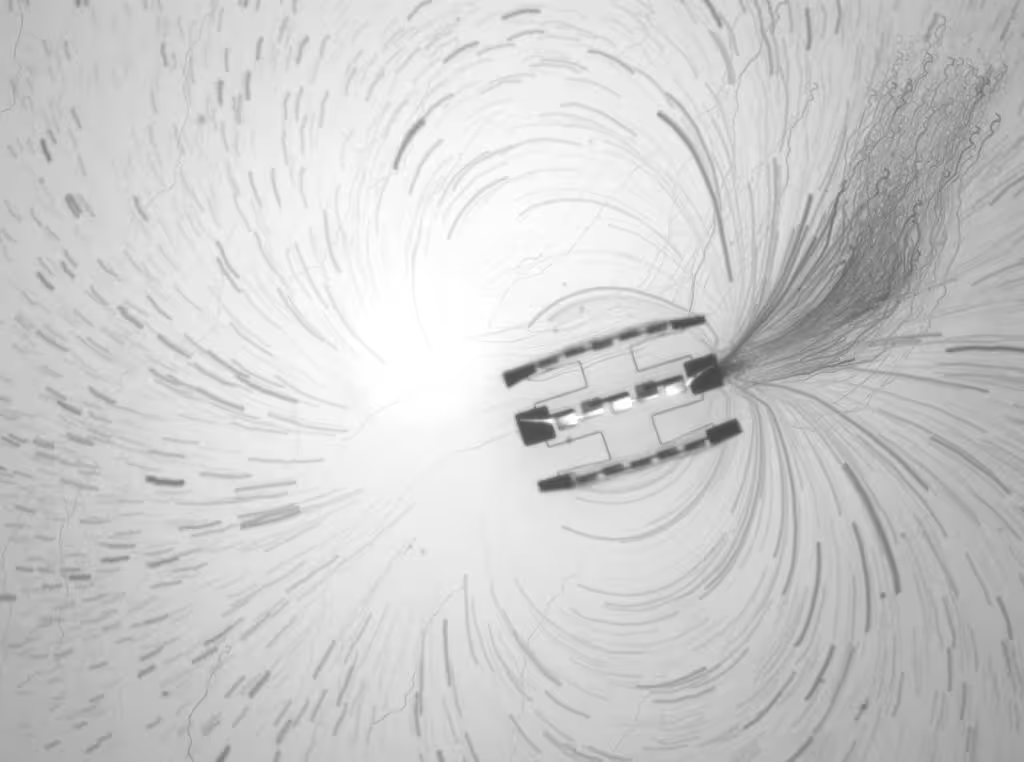
Projektuotas laiko eigos filmavimas, vaizduojantis žymeklių dalelių trajektorijas šalia trijų motorų sujungto roboto. (Lucas Hanson & William Reinhardt/University of Pennsylvania)
Miniatiūriniai skaičiavimai: procesorių ir kodo pergalvojimas
Veikiančio kompiuterio įdėjimas į tokį mažą paketą pareikalavo visiško spausdintinių grandinių ir programų projektavimo pergalvojimo. Mičigano universiteto tyrėjai sukūrė mikroskopinę kompiuterinę architektūrą, pritaikytą minimaliam energijos ir atminties naudojimui, atsižvelgiant į mikrorobotikos aparatinės įrangos apribojimus. Kompiuterių mokslininkas David Blaauw, dalyvavęs projekte, pažymi, kad komanda perdizainavo tiek aparatūrą, tiek programinę įrangą, kad atitiktų specifines energijos ir dydžio ribas.
Dėl ribotos įmontuotos atminties mikrorobotas šiuo metu vykdo paprastas, vietoje paleidžiamas programas. Tačiau net tokie baziniai elgsenos modeliai pakankami autonominiam jutimui, sprendimų priėmimui ir lokomotyvui. Platforma taip pat turi optinius imtuvus, leidžiančius robotams priimti naujas programas per šviesos signalus — tai suteikia galimybę nuotoliniu būdu persiųsti programas arba koordinuoti elgesį.
Kolektyvinis elgesys ir ištvermė
Vienas atskiras prietaisas yra paprastas. Veikiant kartu, jie sugeba sinchronizuotis ir formuoti koordinuotus grupes, elgiančias panašiai kaip žuvų pulkai. Tyrėjai parodė, kad šių mikrorobotų būriai gali veikti autonomiškai mėnesius, jei periodiškai papildomi LED apšvietimu. Pasekmės yra plačios: kolektyviniai, ilgai veikiantys mikrorobotai galėtų atlikti aplinkos stebėjimą, grupinę inspekciją arba, ateityje, biomedicininį monitoravimą skysčiuose.
Mokslinis kontekstas ir galimos taikymo sritys
Ankstesni autonominiai, programuojami mikrorobotai buvo maždaug milimetro dydžio — tai jau buvo techninis pasiekimas, įgyvendintas prieš daugiau nei du dešimtmečius. Funkcionalumo sumažinimas maždaug 10 000 kartų reikalavo inovacijų, kertančių optiką, mikroelektroniką, skysčių mechaniką ir medžiagų mokslą.
- Biomedicininis stebėjimas: tolesnė miniatiūrizacija ir biokompatibilus įpakavimas galėtų leisti mikrorobotams patruliuoti audiniuose ar skysčiuose ir aptikti infekcijas ar uždegimus.
- Aplinkos stebėjimas: būriai galėtų žemėlapiuoti chemines arba terminės koncentracijos gradientes mikroaplinkose, pavyzdžiui, dirvos porose ar mikrofluidikos sistemose.
- Mikroassemblė ir inspekcija: maži, programuojami įrenginiai galėtų tirtį arba manipuliuoti mikrostruktūromis, prieinamomis tradiciniams įrankiams.
Ekspertų įžvalgos
„Tai iš tikrųjų tik pirmoji knygos skyrius,“ sako Marc Miskin. „Parodėme, kad į kažką beveik per mažą pamatyti galima sutalpinti smegenis, jutiklį ir variklį, ir kad tai gali išlikti bei veikti mėnesiais.“
Platesniam kontekstui pateikti realistiškas eksperto komentaras:
Dr. Elena Ruiz, mikrosistemų inžinierė
„Šio darbo įdomumas slypi sisteminiame požiūryje. Sprendimų paieška dėl varomosios jėgos, energijos ir skaičiavimų kartu — o ne atskirai — atrakina galimybes, kurias anksčiau nevertinome kaip įmanomas tokiame mastelyje. Per artimiausią dešimtmetį iteratyvūs patobulinimai atmintyje, energijos surinkime ir medžiagose gali perkelti šiuos įrenginius iš laboratorinių smalsumų į naudingus medicinos ir aplinkos mokslo įrankius.“
Detalus mikroroboto aprašymas paskelbtas žurnale Science Robotics, o komanda jau tiria būdus, kaip išplėsti įmontuotą atmintį ir pridėti turtingesnį elgesį. Iš mažų techninių proveržių kyla didelės galimybės: autonominių mikrorobotų tinklai, kurie juda, jutina ir skaičiuoja skystinėse terpėse, gali pertvarkyti sritis nuo diagnostikos iki aplinkos stebėjimo.
Comments
No comments yet.
Leave a Comment