5 Minutes
Mokslininkai iš Pensilvanijos universiteto (University of Pennsylvania) ir Mičigano universiteto (University of Michigan) sukūrė submilimetro dydžio mikrorobotą, kuriame integruoti kompiuteris, jutikliai ir variklis — visi komponentai telpa į įrenginį, mažesnį nei druska. Straipsnis publikuotas žurnale Science ir aptartas leidinyje The Washington Post; tyrėjų komanda teigia, kad šis mikrorobotas gali nurodyti kelią naujos kartos medicinos priemonėms, galinčioms veikti žmogaus kūno viduje. Tokie autonominiai mikrorobotai žada naujas galimybes tikslinei vaistų pristatymo sistemai, vietinei diagnostikai ir smulkioms intervencijoms, kurių neįmanoma atlikti įprastais instrumentais.
Mikrorobotas, galintis jausti, mąstyti ir judėti
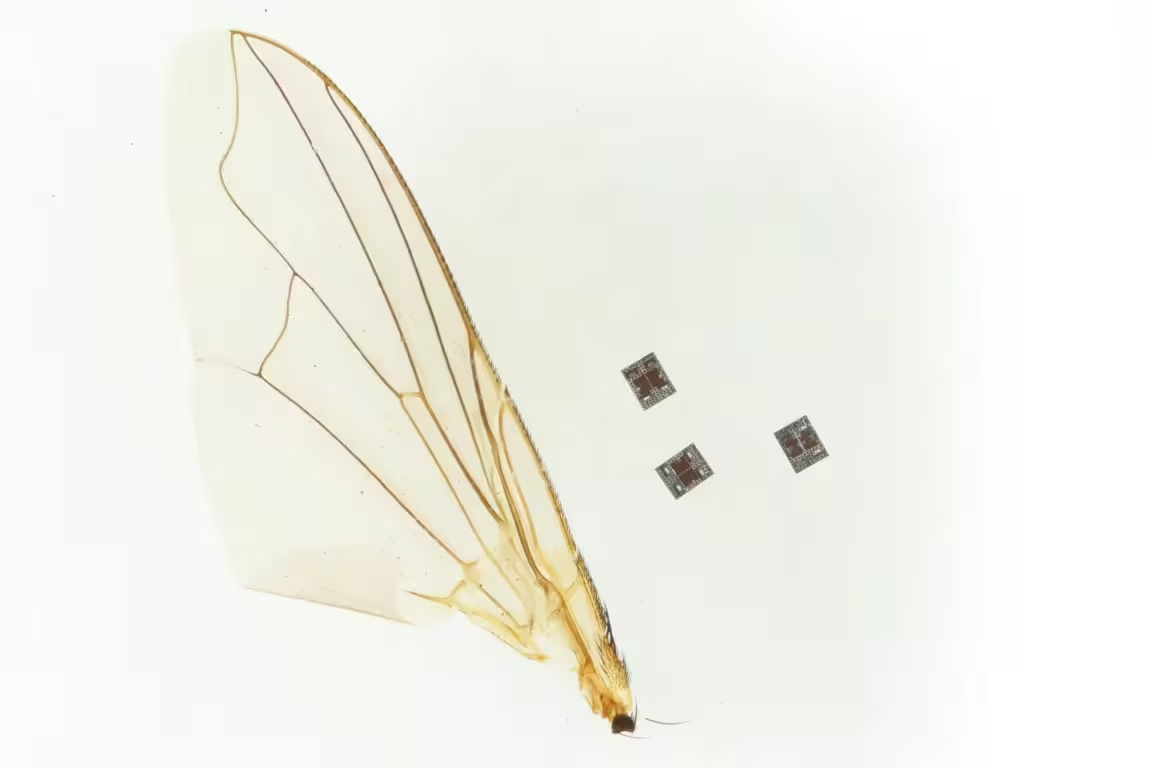
Naujasis prietaisas nėra tikrasis nanomasto, tačiau submilimetro dydžiu jis yra išskirtinai mažas: savo masteliu maždaug lygus arba tam tikrose dimensijose net mažesnis už vieną valgomojo druskos grūdelį. Marc Miskin, Pensilvanijos universiteto elektros ir sistemų inžinerijos lektorius ir straipsnio bendraautorius, apibūdino jį kaip „pirmą labai mažą robotą, kuris gali jausti, mąstyti ir veikti“ — tai reiškia, kad viename pakete sujungti vietinė skaičiavimo dalis, energijos konversija ir judėjimo mechanizmas. Tokia integracija žymi reikšmingą poslinkį mikrorobotikos srityje, nes iki šiol daugelis mažo mastelio prietaisų priklausė nuo išorinių valdymo sistemų arba buvo visiškai pasyvūs.
Prototipas vis dar liko eksperimentinis ir kol kas nėra patvirtintas naudoti žmogaus viduje. David Blaauw, Mičigano universiteto profesorius ir bendraautorius, leidiniui The Washington Post sakė, kad nebūtų nustebintas, jei praktinės taikymo sritys atsirastų per dešimtmetį. Toks atsargus optimizmas atspindi tiek dideles galimybes, tiek ir technines kliūtis, kurios dar laukia sprendimo: nuo energijos tiekimo ir biokompatibilumo iki masinės gamybos ir saugių klinikinių įgyvendinimo strategijų. Kartu su akademinėmis žiniomis šių priemonių vystymui reikės tarpdisciplininių komandų — mikroelektronikos specialistų, biomedicinos inžinierių, klinikų ir reguliavimo ekspertų.
Kaip tai veikia ir kodėl tai svarbu
Iš esmės praeities mikrorobotai dažnai priklausė nuo išorinių valdymo sistemų — nuotoliniai magnetiniai laukai, optiniai jungtys ar išorinė elektronika — todėl jų autonomija buvo ribota, nes vietinio duomenų apdorojimo trūko. Naujojo prietaiso naujovė yra vietinė autonomija mikro masteliu: robotas turi labai mažą kompiuterį, aplinkos jutiklius ir aktyvatorių, taip pat naudoja miniatiūrines fotovoltines ląsteles, kad surinktų energiją tiek skaičiavimams, tiek varikliui. Tokia sprendimų logika leidžia atlikti paprastus vietinius sprendimus be nuolatinio išorės valdymo — pavyzdžiui, nustatyti šviesos lygį, reaguoti į chemines ar mechanines kliūtis bei koreguoti trajektoriją remiantis vietiniais duomenimis.
Medžiagos ir dizainas
- Struktūra: sukonstruota iš silicio su metaliniais sluoksniais, įskaitant platiną ir titano jungtis elektrodams bei atspariems komponentams. Silicio naudojimas leidžia pasinaudoti mikroschemų gamybos technologijomis (CMOS) ir MEMS procesais, tokiu būdu integruojant mechanines, elektrines ir logines funkcijas viename luste.
- Energija: miniatiūrinės saulės (fotovoltinės) ląstelės konvertuoja šviesą į elektros energiją, kad būtų tiekiama galios vietiniam procesoriui ir judėjimo sistemai. Tokie sprendimai yra efektyviausi esant pakankamai apšvietimo, o klinikinėms sąlygoms pritaikyti sprendimai gali apimti ir išorinius šviesos šaltinius ar papildomas energijos kaupimo priemones.
- Jutikliai ir logika: kompaktiška elektronika leidžia prietaisui fiksuoti aplinkos parametrus (pvz., apšvietimą, chemines ar mechaniškai svarbias sąlygas) ir priimti paprastus sprendimus be nuolatinio išorinio valdymo. Integruoti logikos elementai bei mažos energijos sąnaudos optimizuotos skaičiavimams, navigacijai ir saugos funkcijoms.
Veikimas mikronų lygyje (viena milijonoji metro dalis) suteikia šiems robotams sąsają su ta pačia fizine erdve, kurioje veikia daug biologinių vienetų — nuo ląstelių iki smulkių kraujagyslių ir audinių struktūrų. Dėl to atsiveria potencialios biomedicininių taikymų galimybės: tikslinė vaistų pristatymo sistema į specifines vietas organizme, mikroskopinės audinių pažeidimų taisymas, vietinė diagnostika (pvz., mikroaplinkos cheminių parametrų stebėjimas) arba sunkiai pasiekiamų kūno sričių inspekcija. Be to, mažas dydis gali sumažinti invazyvumo laipsnį ir galimybę veikti be atviros chirurgijos.
Visgi lieka esminių iššūkių: energijos tiekimas prietaisams, veikiančiuose žemo apšvietimo vidaus aplinkose (pvz., giliai kūno audiniuose), reikalaus alternatyvių sprendimų — optinių šviesos kanalų, elektros laidų ar nesaugių magnetinių laukų pakeitimo. Reikia užtikrinti biokompatibilumą — medžiagų paviršiaus apdaila, kurios būtų inertinės ir neprovokuotų imuninių reakcijų, taip pat sprendimai dėl ilgalaikio biologinio saugumo ir degradacijos ar pašalinimo. Gamybos masto klausimas — kaip gaminti tokius prietaisus ekonomiškai ir su aukštu derlingumu — taip pat yra svarbus barjeras iki plačios klinikinės taikomosios praktikos. Be to, būtina kurti saugias valdymo bei atkūrimo strategijas klinikiniam naudojimui: kas nutiks prietaisui avarijos atveju, kaip jį lokalizuoti, neutralizuoti ar pašalinti iš organizmo?
Tyrėjų komanda pabrėžia, kad šis prototipas yra pagrindinis žingsnis, o ne galutinis produktas. Įdiegus jutimą, skaičiavimo pajėgumus ir aktorių į vieną submilimetro prietaisą, pakeičiami ankstesni kompromisai, kurie verčia mikrorobotus būti arba pasyviais, arba išorės valdomais. Dėl to atsiveria naujos architektūros galimybės: vietinio sprendimų priėmimo sluoksnis gali sumažinti duomenų perdavimo poreikį, padidinti operacijų greitį ir leisti atitinkamai pritaikyti elgseną realioje aplinkoje. Tokia platforma tampa baziniu sluoksniu tolesniems iteracijoms, kurioms galima pridėti sudėtingesnius sensorius, pažangesnę logiką ar efektyvesnes energijos kaupimo sistemas.
Per artimiausius metus inžinieriai ir mokslininkai tobulins energijos surinkimo mechanizmus, jutiklių tikslumą ir medžiagas, siekdami pereiti nuo laboratorinių demonstracijų prie realių užduočių. Tai apima fotovoltinių ląstelių efektyvumo didinimą esant priklausomam spektrui, energijos valdymo grandinių optimizavimą, ultražemo energijos suvartojimo logiką ir bendrą sistemos patvarumo gerinimą. Sėkmingai įgyvendinus šiuos patobulinimus, autonominiai mikrorobotai galėtų tapti nauja medicinos priemonių klase — mažytėmis mašinomis, kurios naviguoja organizme, reaguoja į vietines sąlygas ir tiekia terapiją ten, kur tradiciniai instrumentai nepasiekia.
Be technologinių sprendimų, reikės spręsti ir reguliacinius, etinius bei klinikinius klausimus, susijusius su pacientų sauga, prietaisų stebėsena ir atsakomybe. Klinikiniai tyrimai, reglamentavimas ir standartai užims esminę vietą — tokie prietaisai turės pereiti griežtą testavimą, kad įrodytų efektyvumą ir saugumą. Taip pat svarbu aptarti pacientų sutikimo procesą ir skaidrumą, ypač kai kalbama apie prietaisus, kurie veikia kūno viduje ir gali keisti biologinę aplinką ar išlikti ilgą laiką. Interdisciplininė sąveika tarp inžinerijos, medicinos, teisės ir bioetikos leis saugiai ir atsakingai judėti nuo prototipų prie klinikinių taikymų.
Comments
No comments yet.
Leave a Comment