7 Minutes
Roveris tęsė kelionę. Tam tikra prasme vienas. Dvi dienas 2025 m. gruodį NASA roveris Perseverance įveikė 456 metrus Marso paviršiumi, naudodamas maršruto taškus, sugeneruotus dirbtinio intelekto (DI) sistema, be tiesioginio žmogaus valdymo prie vairo. Šis atstumas – beveik pusantro futbolo aikštės – automobiliui nėra didelis, tačiau yra reikšmingas įrenginiui, kuris veikia per dešimtis milijonų kilometrų tuščios erdvės ir susiduria su 12–25 minučių ryšio delsos skirtumu tarp Žemės ir Marso. Tokia delsos trukmė daro tiesioginį televaldymą sudėtingu ir verčia misijų valdymo grupes labiau pasitikėti autonominėmis sistemomis, kurios sugeba priimti sprendimus realiuoju laiku.
Kas įvyko Marse
Eksperimas sujungė dvi autonomijos rūšis. Žemės komandos panaudojo DI sistemą, apmokytą analizuoti aukštos raiškos orbitines nuotraukas ir skaitmeninius reljefo modelius (DEM), užduodamos jai aptikti pavojus ir pasiūlyti saugų maršrutą. Gautų taškų grandinė buvo siunčiama į Perseverance, o roverio vietinė automatinė navigacijos programinė įranga atliko važiavimo valdymą, fiksuodama naujus vaizdus ir koreguodama kursą realiuoju laiku pagal vietines sąlygas ir kamerų duomenis.
Tai nėra pirmas kartas, kai Marso roveris važiavo savarankiškai; Perseverance jau reguliariai naudoja autonominę navigaciją ir vietos kliūčių vengimo algoritmus (auto-nav). Tačiau naujovė šiuo atveju – DI sugeneruotas planavimo žingsnis. Vietoje to, kad Žemės operatoriai žymėtų tarpus tarpslėnius kas ~100 metrų, DI įvertino HiRISE orbitines nuotraukas ir reljefo duomenis, sudarė tęstinį, pavojų vengiantį kelią, kurio Perseverance galėjo laikytis ilgesnėmis atkarpomis. Tai leidžia kurti labiau optimizuotus ir nuoseklius maršrutus, atsižvelgiant į reljefo ypatybes, mokslo prioritetus ir transporto priemonės dinamiką.
Kaip komanda sumažino riziką
Kiekvienas už Žemės ribų vykdomas bandymas prasideda atsargiai. Prieš bet kurį DI-sugeneruotą maršrutą pasiekus Marsą, inžinieriai išbandė planą prieš Žemės kopiją roverio: Vehicle System Test Bed (VSTB), esančią JPL Mars Yard testinėje aikštelėje. VSTB yra inžinerinis modelis, skirtas atkartoti problemas, patvirtinti programinę įrangą ir repetuoti naujas procedūras kontroliuojamoje aplinkoje. JPL tokius techninius dvynius yra sukūręs ir kitoms misijoms, įskaitant Curiosity, kad būtų galima identifikuoti trūkumus ir įvertinti saugumo ribas prieš siunčiant komandas į tikrąją misiją.
Šis hardware-in-the-loop (aparatūros įtraukimo) etapas suteikė operatoriams pasitikėjimo. DI jau anksčiau atrinko ir pašalino akivaizdžius pavojus – smėlio duobes, akmenų laukus, išverstą uolieną ir kitus reljefo iškilimus – bei pažymėjo maršruto taškus, kurie vingiavo tarp kliūčių. Taškai, praėję žemės testus, buvo įkeltI į roverį, ir Perseverance Marse vykdė du dienų trukmės važiavimą, nuvažiavęs 456 metrus (1 496 pėdos) be žmogaus teleoperacijos. Tokia procedūra sumažina akivaizdžių rizikų tikimybę, tuo pačiu leidžiant išbandyti ir vertinti DI planavimo kokybę realiomis sąlygomis.
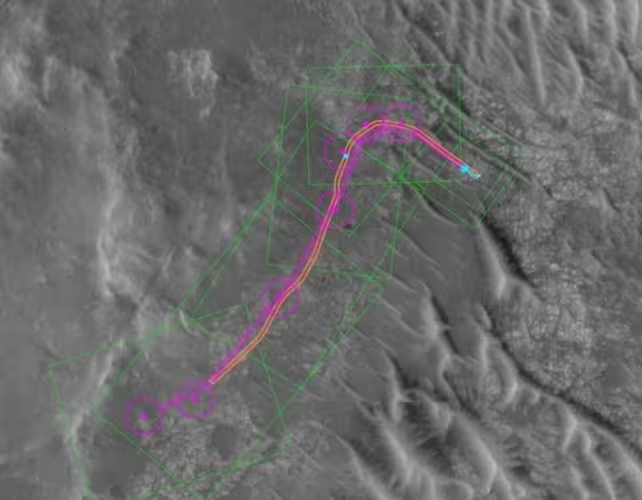
Ši anotacija orbitinėje nuotraukoje rodo Perseverance maršrutą jo antrosios autonominės važiavimo dienos metu 2025 m. gruodžio 10 d. Purpurinė linija žymi DI suplanuotą maršrutą, o oranžinė – tikrąjį faktinį kelią.
Kodėl tai svarbu
Atstumas yra tik dalis pasakojimo. Reali pažanga susijusi su galimybe išplėsti tyrimus, sprendžiant laiko delsos problemą ir operatorių ribotą pralaidumą. Signalai į Marsą ir atgal keliauja minutes; ši vėlavimo trukmė verčia misijų komandas iš anksto planuoti važiavimus ir tada pasitikėti roveriu, kad jis laikysis nurodymų. Kuo ilgesni ir sudėtingesni tie važiavimai, tuo labiau gali augti netikrumas dėl roverio tikslios padėties – tai inžinierių vadinama lokalizacijos poslinkiu (localization drift). Jei poslinkis per didelis, gali kilti padidintos rizikos susidurti su netikėtomis kliūtimis arba prarasti mokslo galimybes dėl netikslių pozicijų.
Norint išplėsti važiavimus nuo šimtų metrų iki kilometrų skalės, roveris turi dažniau persiregistruoti (re-localize), susiejant žemės lygio nuotraukas su orbitinėmis žemėlapio mozaikomis ir atnaujinant padėties įverčius. Šiandien žmonės vis dar atlieka daug šių suderinimų rankiniu būdu arba stebi procesą. Generatyvinis DI žada pagreitinti šį procesą, išmokdamas greičiau ir patikimiau derinti žemės nuotraukas su orbitiniais vaizdais, taip mažinant operatorių krūvį ir leidžiant vykdyti ilgesnius bei saugesnius pravažiavimus. Greitesnė lokalizacija taip pat reiškia geresnį mokslinių taškų identifikavimą ir prioritetų nustatymą, kas ypač svarbu ribotų misijos laikotarpių ir energijos atžvilgiu.

Mėlyna spalva šioje iliustracijoje parodo, kaip roverio neapibrėžtumas dėl padėties paviršiuje didėja, kuo toliau jis seka iš anksto nustatytas instrukcijas.
Mokslo ir inžinerinis kontekstas
Autonomiška navigacija remiasi trimis pamatiniais komponentais: suvokimu (perception) – gebėjimu pamatyti pavojus ir naudingas ypatybes; lokalizacija (localization) – žinoti, kur roveris yra tiksliame paviršiaus koordinačių kontekste; ir planavimu bei valdymu (planning and control) – pasirenkant ir laikantis saugaus kelio. Generatyvinis DI daugiausia padeda suvokimui ir planavimui, nes geba greitai apdoroti ir interpretuoti dideles orbitinių mozaikų sritis, pasiūlyti maršrutus, kurie vengia rizikos zonų ir tuo pat metu prioritetizuoja moksliškai įdomias vietas, pavyzdžiui, raižytas uolienų sankaupas ar potencialias purvo sedimentų zonas.
Perseverance įmontuota vietinė autonomija suteikia antrą sluoksnį: ji fiksuoja vaizdą važiuodama ir priima smulkius sprendimus, kad nedelsiant apvažiuotų iškilusias kliūtis, kurių nebuvo matyti orbitiniuose duomenyse arba kurių pozicija pasikeitė. Šių dviejų lygių – orbitinio planavimo ir vietinio kliūčių vengimo – sujungimas sukuria uždarą kilpą, kuri ateičiai gali leisti vykdyti ilgesnes vairavimo sekas su mažiau duomenų siuntimo ciklų (uplink). Tokie procesai taip pat optimizuoja energijos naudojimą, nes rečiau reikia siųsti ir laukti komandų iš Žemės.
Svarbu pažymėti, kad šis demonstracinis bandymas naudojo DI modelį, kilusį iš Anthropic Claude architektūros, integruotą į griežtą inžinerinį darbo srautą. NASA akcentuoja kruopštų patvirtinimą: kiekvienas siūlomas maršrutas buvo patikrintas prieš Mars Yard kopiją ir ištestuotas simuliacijose prieš siunčiant komandas per tarpplanetinę erdvę. Tai yra apgalvotas, palaipsnis progresas – ne nerūpestingas šuolis. Tokia disciplina yra būtina, kai vertinamos technologijos, kurios gali turėti tiek didelę mokslo grąžą, tiek reikšmingą riziką misijoms ir brangiems inžineriniams resursams.
Kur tai veda toliau
Tikėtina, kad DI vaidmuo artėjančiose misijose tik didės. Jau egzistuoja koncepcijos roveriams, kurie galėtų dislokuoti dronų spiečius (swarms of drones) tyrinėti reljefą už tiesioginio matomumo ribų, o įmontuotos sistemos koordinuotų kelis judančius vienetus. Toks daugiaagentis požiūris reikalauja pažangios lokalizacijos, bendro situacijos suvokimo ir užduočių skirstymo algoritmų, kad kiekvienas elementas veiksmingai prisidėtų prie bendrų misijos tikslų.
NASA misija Dragonfly į Saturno mėnulį Titaną, rotorinis zondas, skirtas mėginiams imti sudėtingoje, mėnulinio dydžio aplinkoje, planuoja naudoti autonominę navigaciją ir įmontuotą duomenų kuraciją, kad valdyti stebėjimus skrydžių tarp mokslo taškų metu. Dragonfly pavyzdys pabrėžia, kaip autonomija gali būti pritaikyta ne tik ratiniams roveriams, bet ir skraidančiai aparatūrai, kur greitis, orientacija ir vietos pasirinkimas yra kritiniai. Tokios sistemos gali autonomiškai priimti sprendimus, kuriuos anksčiau būtinai turėjo peržiūrėti ir patvirtinti Žemės operatoriai.
JPL inžinieriai mato ateitį, kurioje edge computing ir kruopščiai parinkti DI modeliai nešios misijų komandų sukauptą patirtį į lauką: protingos sistemos, kurios prioritetizuoja tikslus, pažymi neįprastus uolienų darinėlius mokslininkams namuose ir kuria kelių dienų trajektorijas, išlaikydamos riziką priimtinu lygiu. Nauda – ne tik didesnis nuvažiuotas plotas, bet ir padidėjęs mokslinių rezultatų kiekis vienam misijos doleriui, t. y. efektyvesnė mokslo ekonomika tokiose brangiose programose.
Ekspertų įžvalgos
'Toks demonstravimas yra logiškas kitas žingsnis,' sako dr. Elena Marconi, planetinės robotikos inžinierė su daugybe lauko patirties. 'Mes išmokėme mašinas matyti skirtingais masteliais – nuo orbitos iki roverio kamerų – ir dabar mokome jas planuoti taip, kad tai atkartotų žmogaus atsargumą, bet veiktų mašininio greičio tempu. Rezultatas – tai daugiklis tyrinėjimams: protingesni, ilgesni pravažiavimai, kurie atlaisvina mokslininkus ir leidžia jiems sutelkti dėmesį į patraukliausius atradimus.'
Vandi Verma, JPL kosminių robotų specialistas, dirbęs su Perseverance, pažymėjo, kad generatyvinis DI turi potencialo supaprastinti suvokimą, lokalizaciją ir planavimą užplanetiniam važiavimui. NASA tyrimų vadovai tai vertina kaip technologinio pagrindo kūrimą ilgalaikei žmonių ir robotų buvimo už Žemės ribų plėtrai. Kaip Matt Wallace, JPL Exploration Systems Office vadovas, yra nurodęs, keliavimo link Mėnulio ir Marso apšvietimas reikalauja protingų sistemų, veikiančių tiek ant paviršiaus, tiek periferijoje (edge), kad palaikytų žmonių ir robotų bendradarbiavimą tolimojoje kosmoso aplinkoje.
Perseverance dviejų dienų, 456 metrų autonominis važiavimas nėra nei finišo linija, nei triukas. Tai yra apgalvotas gebėjimų patobulinimas, patvirtintas prieš inžinerinius dvynius ir vykdytas pagal konservatyvias procedūras. Eksperimentas įrodo ne tik tai, kad DI gali pasiūlyti gyvybingus maršrutus iš orbitinių duomenų, bet ir kad gerai išbandyta Žemės bei vietinė autonomijos integracija gali saugiai praplėsti atstumą, kurį roveris gali nuvažiuoti tarp duomenų siuntimo ciklų, tuo pačiu pažymėdama mokslui įdomias vietas artimesniam tyrimui.
Kiekvienas metras kitoje planetoje yra svarbus. Su kiekvienu sėkmingu autonominiu kilometru mūsų robotiniai tyrinėtojai suteikia mums daugiau laiko mąstyti, planuoti ir daryti atradimus, kurie formuos būsimąsias misijas – o galiausiai ir žmones, kurie eis paskui juos į Saulės sistemą.
Comments
No comments yet.
Leave a Comment