
7 Minutes
Tyrėjai parodė, kad garso bangos gali koordinuoti didelius mažų robotų spiečius, kurie elgiasi kaip gyvos kolektyvinės sistemos: juda vieningu ritmu, prisitaiko prie siaurų erdvių ir net atstato savo struktūrą po pažeidimų. Šis atradimas, kurį vadovavo Penn State komanda ir kuris publikuotas žurnale Physical Review X, atveria naujas mikrorobotikos taikymo kryptis medicinoje, aplinkos valyme ir kituose sektoriuose.
Naujas tyrimas, kurį inicijavo Penn State mokslininkai, pirmą kartą demonstruoja, kaip garso bangos galėtų veikti kaip valdymo priemonė itin mažo dydžio robotams.
Why acoustic signals matter for swarm robotics
Biologinės grupės – nuo šikšnosparnių, naudojančių eholokaciją, iki vabzdžių, susibarančių spiečiais – dažnai naudoja garsą navigacijai ir koordinacijai. Įkvėpti gamtos procesų, tyrėjai sukūrė modelį, kuriame mikrorobotai skleisdavo ir aptikdavo akustinius signalus, kad išlaikytų spiečiaus vientisumą ir kryptį kaip grupė. Akustinė komunikacija tampa išskirtine, nes garsas sklinda greitai ir santykinai mažai slopsta, palyginti su cheminiais signalais, todėl tai efektyvus koordinacijos kanalas tarp paskirstytų, paprastų įrenginių.
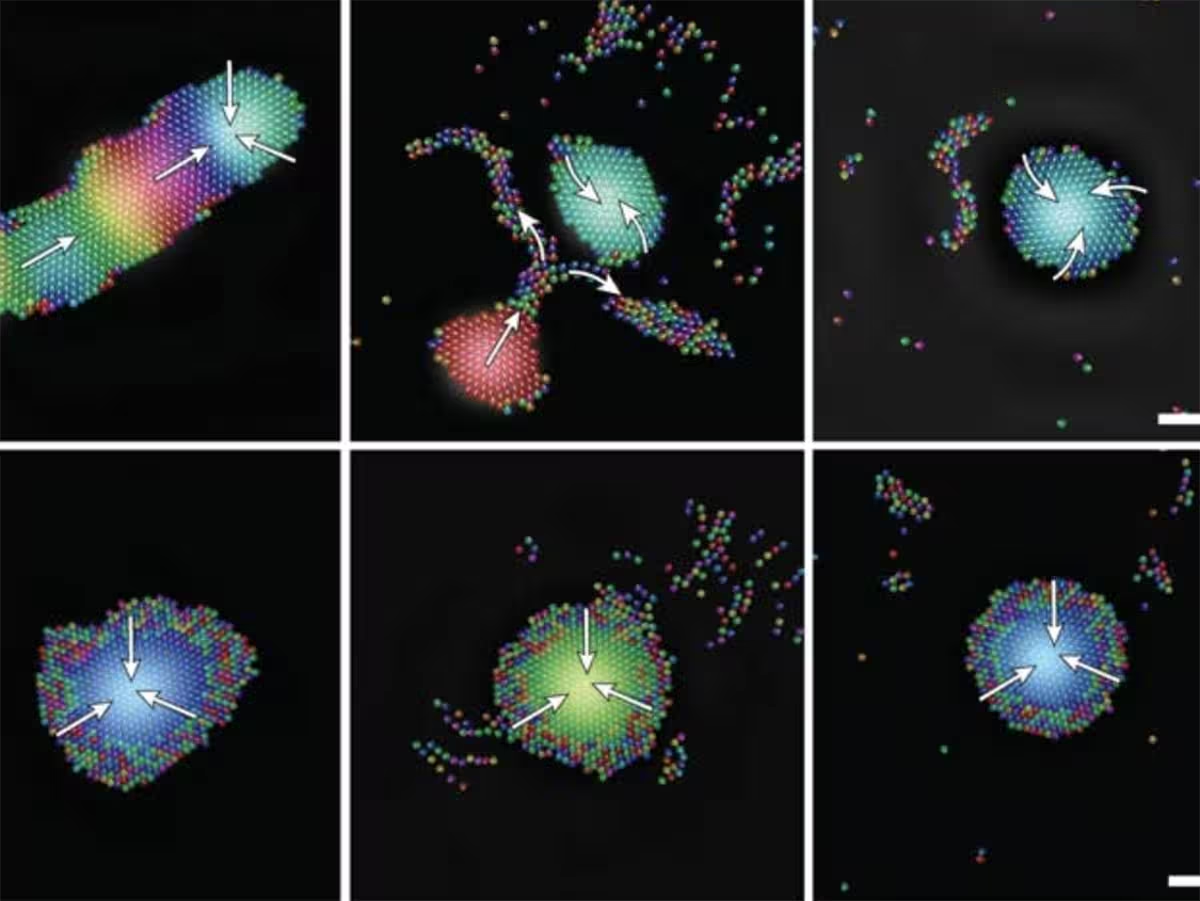
Penn State simuliacijose kiekvienas agentas turėjo minimalų aparatūros profilį: variklį judėjimui, mažytį mikrofoną ir garsiakalbį garso mainams, bei osciliatorių judesių sinchronizavimui su akustiniu lauku. Nepaisant šios paprastybės, kolektyvas generavo sudėtingus, emergentinius elgesio modelius – keitė formą, konvergavo link stipriausių signalų ir atstatydavo struktūrą po trikdžių. Tokie elgesiai paprastai siejami su pažangesniais valdymo sistemų sprendimais, bet čia jie iškilo iš minimalistinės konfigūracijos.
Be to, akustinės sistemos ypatybės leidžia skalę padidinti nesudėtingai: paprasti garsinių signalų generatoriai ir aptikimo grandinės gali būti pritaikomi masinei gamybai, o akustinis signalo apdorojimas gali būti iš dalies decentralizuotas, paliekant sudėtingesnę logiką išorinėms vienetų grupėms ar debesų sprendimams. Tai atveria kelią ne tik eksperimentams laboratorijose, bet ir praktiniam pritaikymui lauko sąlygomis.
How the simulation worked: a peek under the hood
Komanda naudojo agentais pagrįstą kompiuterinį modelį, sekantį tūkstančius mažų, savarankiškai varomų vienetų. Kiekvienas imituojamas mikrorobotas skleidė periodinius akustinius signalus ir matavo vietinį akustinį lauką, kurį formavo jo kaimynai. Sinchronizuodamas savo vidinį osciliatorių su dominuojančia vietine dažnio charakteristika ir judėdamas link stipriausio akustinio šaltinio, labai paprastų vienetų agregatas saveorganizavosi į koherentiškus spiečius.
Modelis veikė pagal bendrus fizikos principus, o ne užrašytą konkrečią komandinę bazę, todėl mokslininkai teigia, kad eksperimentinės įgyvendinimo versijos su panašiomis akustinėmis ir mechaninėmis charakteristikomis turėtų atkartoti pagrindinius reiškinius. Kitaip tariant, kolektyvinis intelektas išsivystė iš kuklių statybinių blokų – be centralizuoto valdiklio, be detalaus aplinkos žemėlapio, tik su vietiniu, garsiniu grįžtamuoju ryšiu.
Simuliacijos logika grindžiama keliomis svarbiomis techninėmis prielaidomis: akustinio lauko superpozicija (kaip skirtingų vienetų signalai susilieja), signalo slopinimo funkcija atstumo atžvilgiu, bei vietinė oscilatorių fazės sinchronizacija. Tokie aspektai leido modeliuoti ne tik pozicionavimą ar judėjimą, bet ir fazinę sutelktį, nuo kurios priklauso spiečiaus stabilumas ir gebėjimas rekonstruotis po mechaninių trikdžių.
Modelio universalumas reiškia, kad eksperimentiniai prototipai su tinkamais akustiniais ir mechaniniais parametrais turėtų parodyti tuos pačius bazinius reiškinius. Paprastai tariant: kolektyvinis elgesys gali kilti iš paprastų komponentų – be sudėtingų centrinių valdiklių ir išsamios aplinkos informacijos. Tokius principus galima pritaikyti įvairiems mikrorobotikos dizainams, leidžiant pasiekti savarankišką koordinaciją naudojant minimalų įrenginių komplektą.
Potential missions: from inside the body to contaminated rivers
Garso valdomų mikrorobotų spiečių patrauklumą didina jų prisitaikymas prie aplinkos. Simuliacijose spiečiai prasismelkė per siaurus koridorius, vėl susiformavo po suskirstymo ir išlaikė funkcionalumą net praradę dalį vienetų. Tokia atsparumo savybė gali kardinaliai pakeisti kelių kritinių taikymo sričių galimybes, įskaitant:
- Taiklūs vaistų pristatymai: mikrorobotų flotilės galėtų nukeliauti per kraujagysles ir sutelkti vaisto dozę konkrečioje audinio zonoje, taip sumažinant sisteminį poveikį ir didinant terapinį efektą. Akustinė navigacija leistų vienetams koordinuotis esant sudėtingiems kraujotakos srautams ir anatominiams kliuviniams.
- Aplinkos remonto darbai: išsibarsčiusios mikrorobotų pajėgos galėtų aptikti ir neutralizuoti teršalus sudėtingose vietose – sedimentuose, vamzdynuose ar sunkiai pasiekiamuose vandens telkiniuose. Akustinė komunikacija suteiktų galimybę koordinuoti veiksmus be nuosekliai perduodamų, brangių radijo ar optinių signalų.
- Paieška, gelbėjimas ir inspekcija: mažos akustinės grupės galėtų tyrinėti sugriuvusias konstrukcijas arba siauras inžinerines ertmes, kuriose žmonėms ar didesniems robotams įeiti pavojinga arba neįmanoma. Garso bangomis pagrįsta koordinacija pagerina vietos žemėlapio kūrimą ir leidžia vienetams koncentruotis prie detales, kur reikia pagalbos ar patikros.
Kiekviena iš šių sričių reikalauja skirtingų praktinių sprendimų: biomediicininėms taikomosioms reikės saugių garso lygių ir biokompatibilių medžiagų; aplinkos taikymams – ilgaamžių, atsparių terpėms variklių ir valdiklių; paieškai – gebėjimo veikti net triukšminguose mechaniniu požiūriu nestabiliuose kontekstuose. Tačiau bendras akustinio valdymo privalumas – jo paprastumas ir energinis efektyvumas – išlieka bendru pavadinimu visiems šiems scenarijams.
Scientific context: active matter and emergent intelligence
Šie atradimai prisideda prie sparčiai augančios disciplinos, vadinamos aktyviąja medžiaga (active matter), kuri tiria, kaip dideli skaičiai savarankiškai judančių vienetų – ląstelių, bakterijų ar sintetinės dalelės – sukuria didelio masto struktūras ir funkcijas. Istoriškai mokslininkai dažnai naudojo cheminius signalus programuodami tarpusavio sąveikas aktyviojoje medžiagoje. Akustinio valdymo demonstravimas plečia šį įrankių rinkinį: garsas sklinda toliau, greičiau ir gali būti perduodamas naudojant labai paprastą ir energiją taupantį aparatą mažose erdvėse.
Pasak tyrimo vadovo Igoro Aronsono, toks požiūris gali duoti mikrorobotus, kurie yra ir „išmanesni“, ir atsparesni, išlaikant minimalią vidinę sudėtingumą. Vietoj to, kad kiekviename vienete būtų daug procesorių ir sensorių, dizaineriai gali pasinaudoti fizikos dėsningumais – akustiniais laukais ir sinchronizacija – kad pasiektų koordinuotą elgesį didelėje skalėje. Tai pakeičia tradicinius dizaino kompromisus tarp įrenginio sudėtingumo ir kolektyvo funkcionalumo.
Aktyviosios medžiagos kontekste akustinė sinchronizacija taip pat suteikia naujų tyrimų galimybių: galima tirti, kaip faziniai režimai, lokalus triukšmas ir topologiniai defektai lemia spiečiaus gebėjimą formuoti sudėtingas struktūras ar perdaryti save pritaikant prie naujų užduočių. Tokie modeliai padeda suprasti tiek natūralias kolektyvines sistemas, tiek dirbtinius spiečius, ir skatina naujus eksperimentinius bandymus fizinių prototipų scenarijuose.
Challenges before real-world devices
Iš simuliacijų į laboratoriją ir dar labiau – į lauko pritaikymą – veda keli praktiniai iššūkiai. Pirmiausia reikia suprojektuoti siųstuvus ir mikrofonus, veikiančius patikimai mikroskopinėje skalėje, kurie būtų ir atsparūs, ir energiją taupantys. Tai apima mikrofono jautrumą, transdukcijos efektyvumą ir signalo švarą triukšmingose terpėse. Taip pat svarbu užtikrinti saugias akustines vertes biologiniams audiniams, jei planuojama taikyti medicinoje – per didelis garso intensyvumas gali sukelti audinių pažeidimus ar šiluminius efektus.
Antra, reikės išvystyti medžiagas ir varomąsias sistemas, kurios funkcionuotų įvairiuose fiziniuose režimuose: cheminės koncentracijos gradientuose, sūkuriuose ar tankiose, porėtose terpėse. Propulsijos sprendimai mikroskalėje (pvz., cheminiai varikliai, magnetiniai laukeliai ar akustiniai stūmokliai) turi būti suderinti su akustine komunikacija, kad sistema bendrai veiktų efektyviai.
Trečia, kontrolė heterogeninėse aplinkose kelia papildomų problemų: reikia sistemų, kurios gebėtų atpažinti ir prisitaikyti prie erdvinės variacijos, kliūčių ir netikėtų trikdžių. Taip pat reikės spręsti trukdžių problemą, kai keli spiečiai veikia netoli vienas kito, nes akustinis laukas gali interferuoti ir sukelti nenumatytą sąveiką. Galimi sprendimai – dažnių kodavimas, laiko dalijimasis ar adaptacinės fazės valdymo strategijos, tačiau visi jie reikalauja papildomo eksperimentavimo.
Galiausiai, etiniai ir reguliaciniai aspektai taip pat turi būti apsvarstyti: ypač medicininėse ar aplinkos intervencijose būtina įvertinti saugumo standartus, poveikį ekosistemoms ir galimas ilgalaikes pasekmes. Bendradarbiavimas su reguliatorių institucijomis ir tarpdisciplininė diskusija padės nustatyti atsakingo diegimo gaires.
Expert Insight
Dr. Maya Patel, robotikos inžinierė, specializuojanti spiečių sistemose, pažymi: "Tikroji akustinės koordinacijos elegancija yra jos paprastume. Kiekvienam mazgui nereikia sudėtingo skaičiavimo – svarbiausias yra tinkamas emisijos, detekcijos ir judesio tarpusavio ryšys. Tačiau pagaminti mažus, atsparius ir energetiškai efektyvius akustinius transduktorius yra kita didžioji užduotis. Jei ją įveiksime, taikymų spektras – nuo tikslios terapijos iki aplinkos stebėjimo – taps milžiniškas."
Šis komentaras pabrėžia du pagrindinius prioritetus: (1) techninį mikroskalės akustinių komponentų kūrimą ir (2) didelio masto sistemų integraciją. Abi kryptys reikalauja sinergijos tarp mikroelektronikos, medžiagų mokslo ir sisteminės inžinerijos, kad teoriniai modeliai virstų praktiniais sprendimais.
What comes next
Ateities darbai greičiausiai sujungs eksperimentus su pamažu mažėjančiais akustiniais komponentais ir realistiškesniais aplinkos modeliais. Reikės tarpdisciplininių komandų, sujungiančių fizikus, inžinierius, biologus ir medžiagų mokslininkus, kad būtų sukurti prototipai ir išbandytas jų veikimas aktualiose situacijose. Eksperimentiniai tyrimai gali apimti tiek stacionarias mašinas dirbtinėse terpėse, tiek in vivo modelius su biomateriais, siekiant įvertinti saugumą ir efektyvumą.
Jei akustiniai spiečiai bus įgyvendinti praktikoje tokie, kokie jie rodomi simuliacijose, jie gali tapti ekonomišku, mažos sudėtingumo keliu link išmaniųjų mikrorobotų, veikiančių kolektyviai sprendžiant užduotis, kurios neįmanomos pavieniams įrenginiams. Tačiau svarbu pabrėžti, kad tarp idėjos ir plataus taikymo yra daug tarpinių etapų: nuo optimizuotų transduktorių iki sertifikavimo ir standartizacijos.
Galiausiai, šis tyrimas ne tik plečia mikrorobotikos galimybes, bet ir prisideda prie fundamentalaus supratimo, kaip fizikos dėsniai gali būti panaudoti informacijos perdavimui ir koordinacijai skirtingų mastelių sistemose. Garso bangos, kaip biologiškai įkvėpta ir technologiškai pritaikoma priemonė, gali tapti kertiniu akmeniu naujos kartos kolektyvinių robotinių sprendimų kūrime.
Raktažodžiai: akustinė koordinacija, mikrorobotika, spiečių robotika, aktyvioji medžiaga, sinchronizacija, garso valdymas, mikroskalės transduktoriai.
Comments
No comments yet.
Leave a Comment